AutoGArrows - GPS based navigation plugin for krpano
Here is AutoGArrows plugin for krpano.
Information about AutoGArrows plugin for Panotour can be found on this page.
AutoGArrows - is a plugin for krpano, which makes navigating the tour automatically based on the GPS coordinates of the panoramas. It compatible with krpano release v 1.21 and above.
What is required for the plugin to work
1. Panoramas with GPS coordinates
2. Panoramas must be correctly aligned relatively to virtual North or contain correct EXIF GPSImgDirection tags
If there is no GPS coordinates
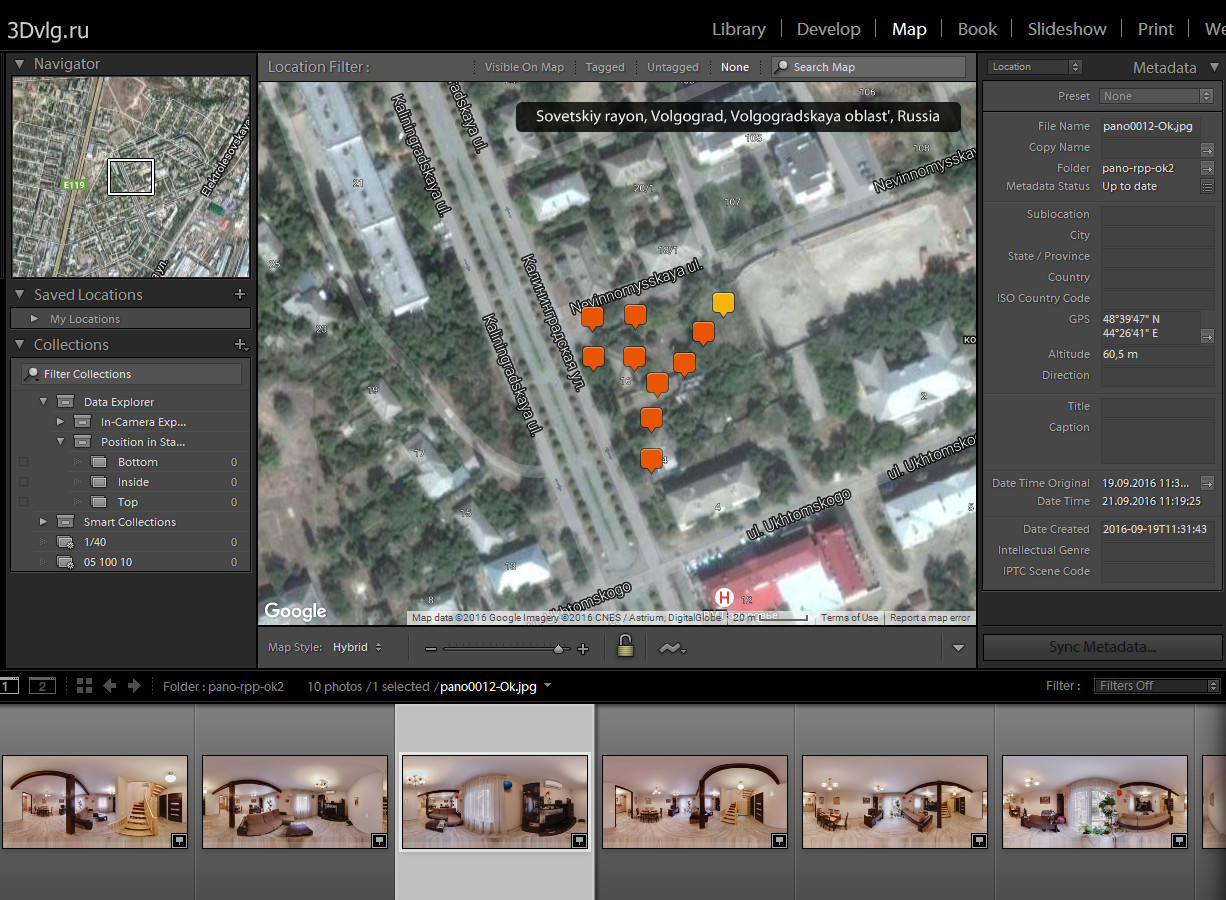
GPS coordinates must be assigned to each panorama. You can use LightRoom, placing the panoramas on the map using MAP tab. Compliance geographic coordinates of the panoramas with actual place of shooting does not matter, the right relative positions of the panoramas on the map is important.
Also you can use program like GeoSetter to synchronize panoramas with recorded GPS track
About virtual North
If the center of each panorama has a constant bearing on the real North that panoramas are aligned correctly. The presence of the same virtual North in the panoramas is very important for the tours with the routes. For these tours KEEPVIEW mode is required. How to shoot and stitch panoramas with the same virtual North you can find on the Robostitcher's home page.

If the panoramas does not have the same virtual North, you need to align them using PTGui or Offset filter in Photoshop. Also you can use prealign plugin to align panoramas in krpano tour. This is the only plugin that saves the necessary data for AutoGArrows.
For panoramas taken by spherical cameras you may not align panoramas. Please read information about use_scenes_heading setting below.
Building the tour with krpano
Build the tour using "MAKE VTOUR (MULTIRES) droplet.bat" for example. Copy autogarrows folder into plugins folder.
At the end of tour.xml file before </krpano> tag insert two lines
<include url="plugins/autogarrows/autogarrows_settings.xml" />
<include url="plugins/autogarrows/autogarrows.xml" />
Before using AutoGArrows you need to modify autogarrows_settings.xml file.
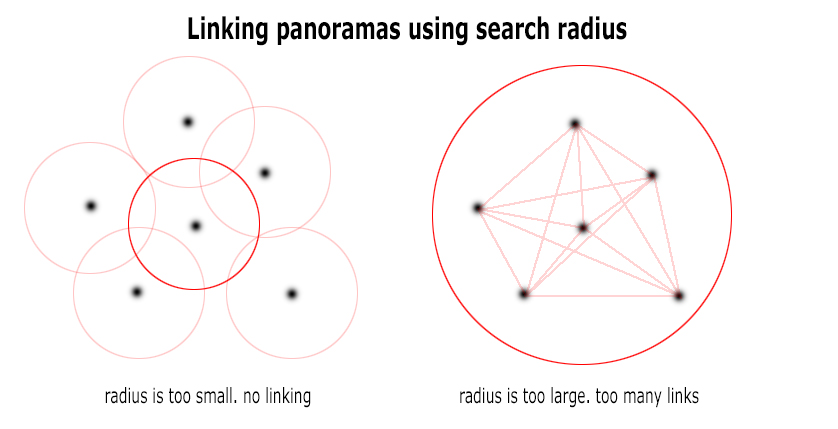
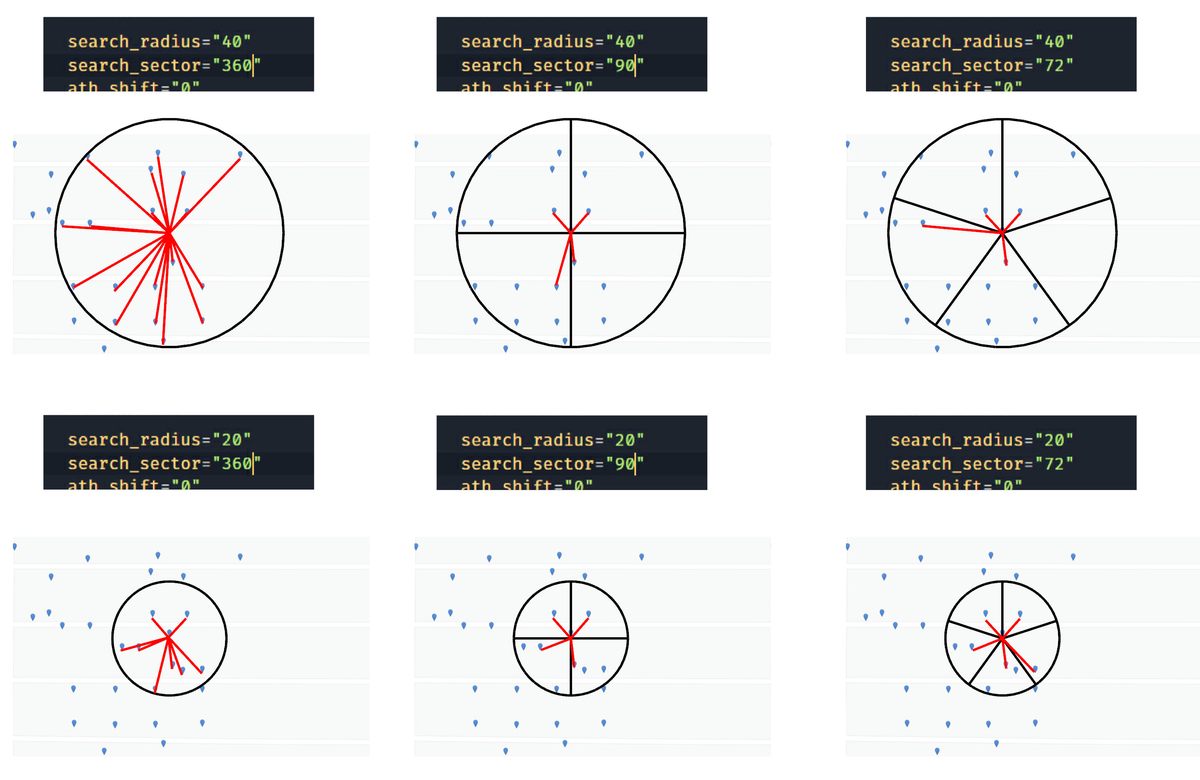
- search_radius Set the search radius (in meters) within which the panoramas will be considered as neighbors and will be linked.
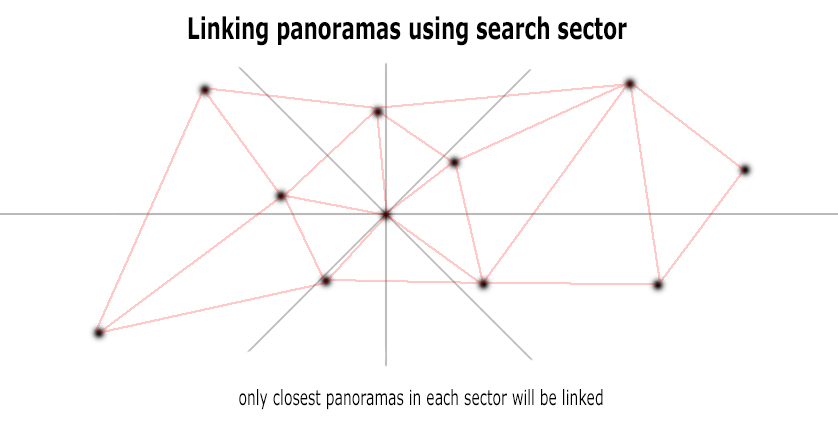
- search_sector Set the search sector (in degrees) where the closest panoramas will be considered as neighbors and will be linked. Only panoramas closer then search_radius will be linked.
- ath_shift Azimuth correction - the number of degrees which will allow to align the virtual North of the panoramas and the real North on the map (terrain).
- create_backups if true AutoGArrows GPS analyser will create backups of autogarrows.xml file on each run
- create_tour_xml if true AutoGArrows GPS analyser will insert hotspots into tour.xml file
- create_tooltips if true AutoGArrows GPS analyser will create tooltips for every created hotspot
- use_scenes_heading values can be disabled (by default), prealign, prealigned, athshift (read below)
- prealign_filename path and file name to Prealign.xml file created by prealign plugin
- tooltips_template template for tooltips. patterns will be replaced with actual values
- hotspots_atv, hotspots_style atv and style values for newly created hotspots
- hotspots_relative_atv - if not zero then hotspots_atv value will change in proportion to the distance. starting value for this parameter is tripod height
Open the tour in browser. There is no navigation yet! To AutoGArrows built the navigation AutoGArrows GPS analyser must be used. To AutoGArrows GPS analyser links the panoramas you need to run it with the project scenes XML file as a parameter (tour.xml file). Drag and drop tour.xml file on autogarrows.exe (There is some difference on using GPS analyser on Windows and MacOS or Linux. On MacOS or Linux you need to use terminal to launch GPS analyser. Look at the video https://www.youtube.com/watch?v=_NZfFFXJIKo)
If after working AutoGArrows GPS analyser arrows are missing, the search radius must be increased. If there are too many, then reduce. Statistics after each run will be a good starting point for more precise radius tuning.
By adjusting the radius of the search neighboring panoramas and azimuth correction, you may need to run AutoGArrows GPS analyser several times. After the first run AutoGArrows GPS analyser create batch file (plugins/autogarrows/autogarrows.xml.bat for Windows and plugins/autogarrows/autogarrows.xml.sh for MacOS or Linux) in order not to use the Drag & Drop every time. Just run it after make changes in the autogarrows_settings.xml file.
Use --noenter command line switch if you wish to run AutoGArrows GPS analyser without having to press Enter.
About 'use_scenes_heading' values
When krpano build the tour it read values from EXIF GPSImgDirection tags and store them for each scene. If panorama was taken with spherical cameras this tag usually contains correct information about panoramas azimuth correction. By default use_scenes_heading is disabled and individual panoramas azimuth corrections are ignored. If use_scenes_heading is prealign (prefer value for keepview'ed tours) then AutoGArrows will prealign panoramas. If use_scenes_heading is athshift then AutoGArrows will use panoramas azimuth correction in hotspots ath values and scenes will remain missaligned (not recomended).
If use_scenes_heading is prealigned then AutoGArrows will read individual azimuth correction for each scene from filename shown in prealign_filename setting. Use this option if you has prealigned scenes with prealign plugin.
If you prealign scenes in the tour be sure you also set hotspot.prealign to true.
Panoramas from some cameras (Samsung Gear 360, for example) do not cantain GPSImgDirection tag, but contain PoseHeadingDegrees wich is the same, but ignored by krpano. In this case you need to use tiny script from panoexif to copy PoseHeadingDegrees values to GPSImgDirection tags before building the tour with krpano.
About 'search_radius' and 'search_sector'
If search_sector is defined then 360 space around every scene will be divided by sectors and only closest panorama in the each sector will be considered as neighbor and will be linked.
Saving tour.xml file with linked scenes
After GPS analyzer has brought satisfactory results you can use it to create tour.xml with liked scenes for you. If create_tour_xml is true AutoGArrows GPS analyser will create tour-autogarrows.xml. You can use newly created tour-autogarrows.xml file instead of tour.xml file and completely remove AutoGArrows plugin from the tour.
Have questions?
Ask a question or search for an answer in the official AutoGArrows plugin's group on Facebook. Please PM me with questions about payments and downloads.
Download AutoGArrows for krpano demo
Fully functional demo versions of the AutoGArrows with AutoGArrows GPS analyzer can be downloaded here.
- Download AutoGArrows plugin with AutoGArrows GPS analyzer for Windows, MacOS and Linux
Download AutoGArrows for krpano
AutoGArrows with AutoGArrows GPS analyzer for Windows, MacOS and Linux can be downloaded from Google drive after donation or from the MyCommerce cloud server instantly after purchase
If you like AutoGArrows please purchase

50 USD fixed price
Link to download AutoGArrows for krpano will be provided instantly after purchase
4650 RUR fixed price
Link to download AutoGArrows for krpano will be provided within few days
AutoGArrows - GPS based navigation plugin for krpano
AutoGArrows - GPS based navigation plugin for krpano
Here is AutoGArrows plugin for krpano.
Information about AutoGArrows plugin for Panotour can be found on this page.
AutoGArrows - is a plugin for krpano, which makes navigating the tour automatically based on the GPS coordinates of the panoramas. It compatible with krpano release v 1.21 and above.
What is required for the plugin to work
1. Panoramas with GPS coordinates
2. Panoramas must be correctly aligned relatively to virtual North or contain correct EXIF GPSImgDirection tags
If there is no GPS coordinates
GPS coordinates must be assigned to each panorama. You can use LightRoom, placing the panoramas on the map using MAP tab. Compliance geographic coordinates of the panoramas with actual place of shooting does not matter, the right relative positions of the panoramas on the map is important.
Also you can use program like GeoSetter to synchronize panoramas with recorded GPS track
About virtual North
If the center of each panorama has a constant bearing on the real North that panoramas are aligned correctly. The presence of the same virtual North in the panoramas is very important for the tours with the routes. For these tours KEEPVIEW mode is required. How to shoot and stitch panoramas with the same virtual North you can find on the Robostitcher's home page.
If the panoramas does not have the same virtual North, you need to align them using PTGui or Offset filter in Photoshop. Also you can use prealign plugin to align panoramas in krpano tour. This is the only plugin that saves the necessary data for AutoGArrows.
For panoramas taken by spherical cameras you may not align panoramas. Please read information about use_scenes_heading setting below.
Building the tour with krpano
Build the tour using "MAKE VTOUR (MULTIRES) droplet.bat" for example. Copy autogarrows folder into plugins folder.
At the end of tour.xml file before </krpano> tag insert two lines
<include url="plugins/autogarrows/autogarrows_settings.xml" />
<include url="plugins/autogarrows/autogarrows.xml" />
Before using AutoGArrows you need to modify autogarrows_settings.xml file.
- search_radius Set the search radius (in meters) within which the panoramas will be considered as neighbors and will be linked.
- search_sector Set the search sector (in degrees) where the closest panoramas will be considered as neighbors and will be linked. Only panoramas closer then search_radius will be linked.
- ath_shift Azimuth correction - the number of degrees which will allow to align the virtual North of the panoramas and the real North on the map (terrain).
- create_backups if true AutoGArrows GPS analyser will create backups of autogarrows.xml file on each run
- create_tour_xml if true AutoGArrows GPS analyser will insert hotspots into tour.xml file
- create_tooltips if true AutoGArrows GPS analyser will create tooltips for every created hotspot
- use_scenes_heading values can be disabled (by default), prealign, prealigned, athshift (read below)
- prealign_filename path and file name to Prealign.xml file created by prealign plugin
- tooltips_template template for tooltips. patterns will be replaced with actual values
- hotspots_atv, hotspots_style atv and style values for newly created hotspots
- hotspots_relative_atv - if not zero then hotspots_atv value will change in proportion to the distance. starting value for this parameter is tripod height
Open the tour in browser. There is no navigation yet! To AutoGArrows built the navigation AutoGArrows GPS analyser must be used. To AutoGArrows GPS analyser links the panoramas you need to run it with the project scenes XML file as a parameter (tour.xml file). Drag and drop tour.xml file on autogarrows.exe (There is some difference on using GPS analyser on Windows and MacOS or Linux. On MacOS or Linux you need to use terminal to launch GPS analyser. Look at the video https://www.youtube.com/watch?v=_NZfFFXJIKo)
If after working AutoGArrows GPS analyser arrows are missing, the search radius must be increased. If there are too many, then reduce. Statistics after each run will be a good starting point for more precise radius tuning.
By adjusting the radius of the search neighboring panoramas and azimuth correction, you may need to run AutoGArrows GPS analyser several times. After the first run AutoGArrows GPS analyser create batch file (plugins/autogarrows/autogarrows.xml.bat for Windows and plugins/autogarrows/autogarrows.xml.sh for MacOS or Linux) in order not to use the Drag & Drop every time. Just run it after make changes in the autogarrows_settings.xml file.
Use --noenter command line switch if you wish to run AutoGArrows GPS analyser without having to press Enter.
About 'use_scenes_heading' values
When krpano build the tour it read values from EXIF GPSImgDirection tags and store them for each scene. If panorama was taken with spherical cameras this tag usually contains correct information about panoramas azimuth correction. By default use_scenes_heading is disabled and individual panoramas azimuth corrections are ignored. If use_scenes_heading is prealign (prefer value for keepview'ed tours) then AutoGArrows will prealign panoramas. If use_scenes_heading is athshift then AutoGArrows will use panoramas azimuth correction in hotspots ath values and scenes will remain missaligned (not recomended).
If use_scenes_heading is prealigned then AutoGArrows will read individual azimuth correction for each scene from filename shown in prealign_filename setting. Use this option if you has prealigned scenes with prealign plugin.
If you prealign scenes in the tour be sure you also set hotspot.prealign to true.
Panoramas from some cameras (Samsung Gear 360, for example) do not cantain GPSImgDirection tag, but contain PoseHeadingDegrees wich is the same, but ignored by krpano. In this case you need to use tiny script from panoexif to copy PoseHeadingDegrees values to GPSImgDirection tags before building the tour with krpano.
About 'search_radius' and 'search_sector'
If search_sector is defined then 360 space around every scene will be divided by sectors and only closest panorama in the each sector will be considered as neighbor and will be linked.
Saving tour.xml file with linked scenes
After GPS analyzer has brought satisfactory results you can use it to create tour.xml with liked scenes for you. If create_tour_xml is true AutoGArrows GPS analyser will create tour-autogarrows.xml. You can use newly created tour-autogarrows.xml file instead of tour.xml file and completely remove AutoGArrows plugin from the tour.
Have questions?
Ask a question or search for an answer in the official AutoGArrows plugin's group on Facebook. Please PM me with questions about payments and downloads.
Download AutoGArrows for krpano demo
Fully functional demo versions of the AutoGArrows with AutoGArrows GPS analyzer can be downloaded here.
- Download AutoGArrows plugin with AutoGArrows GPS analyzer for Windows, MacOS and Linux
Download AutoGArrows for krpano
AutoGArrows with AutoGArrows GPS analyzer for Windows, MacOS and Linux can be downloaded from Google drive after donation or from the MyCommerce cloud server instantly after purchase
If you like AutoGArrows please purchase
50 USD fixed price
Link to download AutoGArrows for krpano will be provided instantly after purchase
4650 RUR fixed price
Link to download AutoGArrows for krpano will be provided within few days